




Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
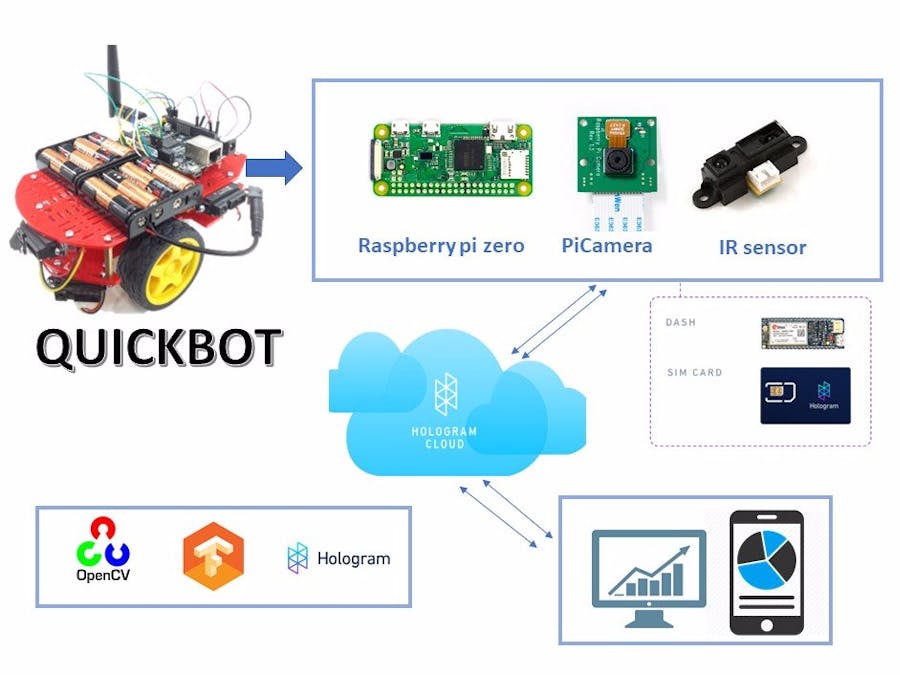
We are currently enrolled in a mobile robot course on Coursera( https://www.coursera.org/learn/mobile-robot ). As part of the course, we are to build a mobile robot(Quickbot), a relative cheap autonomous differential drive. To apply the theory learned in the lectures to the Quickbot. The Quickbot will be built with Sparkfun magic chassis(https://www.sparkfun.com/products/retired/12866). A camera(PiCamera) for vision IR sensors for measuring obstacle, GPS module for localization, Hologram Nova USB Modem for communication and Raspberry pi zero as the control system.
The Quickbot is powered by Raspberry Pi Zero with Hologram Nova USB Modem using Hologram’s python SDK to connect it to a cloud platform (Hologram Cloud or Google Cloud Engine) through a web app. A piCamera will be attached to the Quickbot to interface with OpenCV for image processing and also for training the Quickbot using TensorFlow for machine learning activities like image recognition and lane tracking. A GPS module will be fitted for localization of the Quickbot.
All the hardware and software parts included are:
Raspberry Pi Zero
Hologram Nova Cellular USB Modem
GPS module
IR sensor
Pi camera
OpenCV
TensorFlow
Robotic Operating Systems(ROS)
Thank you for the opportunity.

Kenechi Franklin Dukor





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments